Ingénierie et Architecture
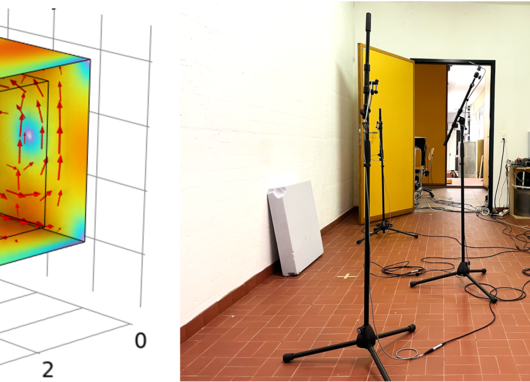
AcouMAT – Innovative Acoustic Materials for Loudspeakers
AcouMAT explores the relationship between the mechanical, chemical, and structural properties of materials and their acoustic behavior in DML panels to support sustainable and scalable audio…