CFRT - Collision Free Robot Trajectory
Ingénierie et Architecture
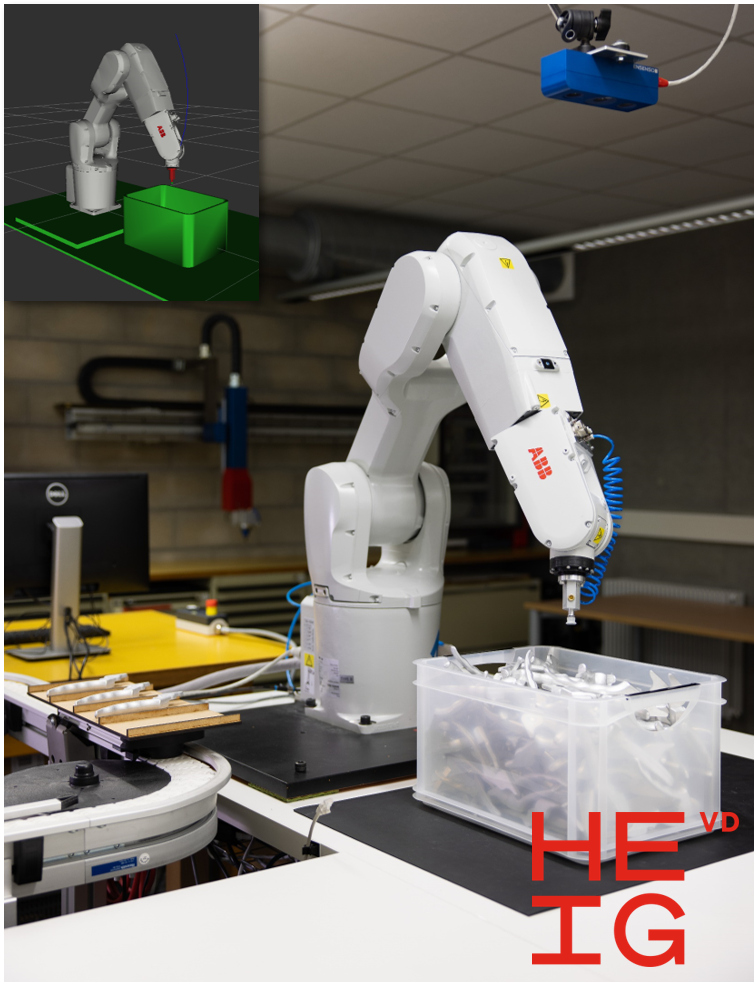
Afin de rester compétitive, l’industrie suisse doit massivement robotiser sa production. Dans ce contexte, un nouveau type de robot dit collaboratif est arrivé sur le marché et permet d’automatiser différentes tâches en collaboration avec l’opérateur. Ce type de robot à cadence moins élevée que les robots de type industriel est idéal pour des lots de tailles moyennes correspondant au contexte industriel suisse. Cependant, ce genre de robot (tout comme les robots industriels) souffrent de 2 limitations majeures : soit leurs trajectoires sont programmées hors ligne et ne tiennent pas compte d'un environnement flexible générant un risque de collision, soit qu’en cas de modification de trajectoires en cours d’exécution, il n'est pas possible de vérifier l'absence de collision. Dans de nombreuses applications, le robot peut faire face à un environnement qui varie et ainsi risquer des collisions. À titre d’exemple, on peut citer des applications de bin picking, applications dans lesquelles il s’agit de venir chercher une pièce qui se trouve en vrac parmi d’autres dans une caisse. Pour développer ce genre d’application, il s’agit de pouvoir déterminer la position et l’orientation d’une pièce à l’aide d’une caméra 3D et de pouvoir générer une trajectoire robot sans collision avec les autres pièces se trouvant dans la caisse. De nombreuses solutions industrielles existent afin de déterminer la pose de la pièce, à l’inverse, peu de solutions sont disponibles dans le but de générer la trajectoire robot sans collision dans cet environnement flexible.
La plupart des logiciels robot disponibles (ABB, Stäubli, UR, …) permettent de générer des trajectoires avec contrôle de collision a priori (hors ligne) avec un environnement, mais n’offrent pas la possibilité de vérifier en cours d’exécution s’il y aura une collision entre le robot, son préhenseur et son nouvel environnement acquis via caméra 3D par exemple.
Dans ce projet, un outil qui permette de vérifier qu’une trajectoire robot peut être faite sans collision avec son environnement, perçu à la volée à l’aide de capteurs, est développé. Pour ce faire, il s’agit de calculer la position des différentes articulations du robot et de son préhenseur au cours du temps en fonction de la position à atteindre et de vérifier l’absence de collision avec les données acquises par les différents capteurs. De plus, en cas de détection de collisions, une nouvelle trajectoire est planifiée afin de l’éviter. Pour pouvoir être utilisée en ligne, cette vérification de collisions et planification de trajectoire doit être rapide dans le but de pouvoir être exécutée en temps masqué, constituant un challenge.