Améliorer la sécurité des vélos électriques grâce aux essais HIL
Ingénierie et Architecture
Les vélos électriques gagnent de plus en plus en popularité pour toute une série d'applications personnelles et professionnelles. La sécurité est une préoccupation importante pour ces véhicules, c'est pourquoi l'industrie du vélo électrique a commencé à adopter la technologie des systèmes de freinage antiblocage (ABS). Cependant, il est difficile de tester les ABS sur les vélos électriques, en particulier dans les premières phases de validation sur route, car un freinage brusque avec blocage de la roue avant présente un risque pour le cycliste.
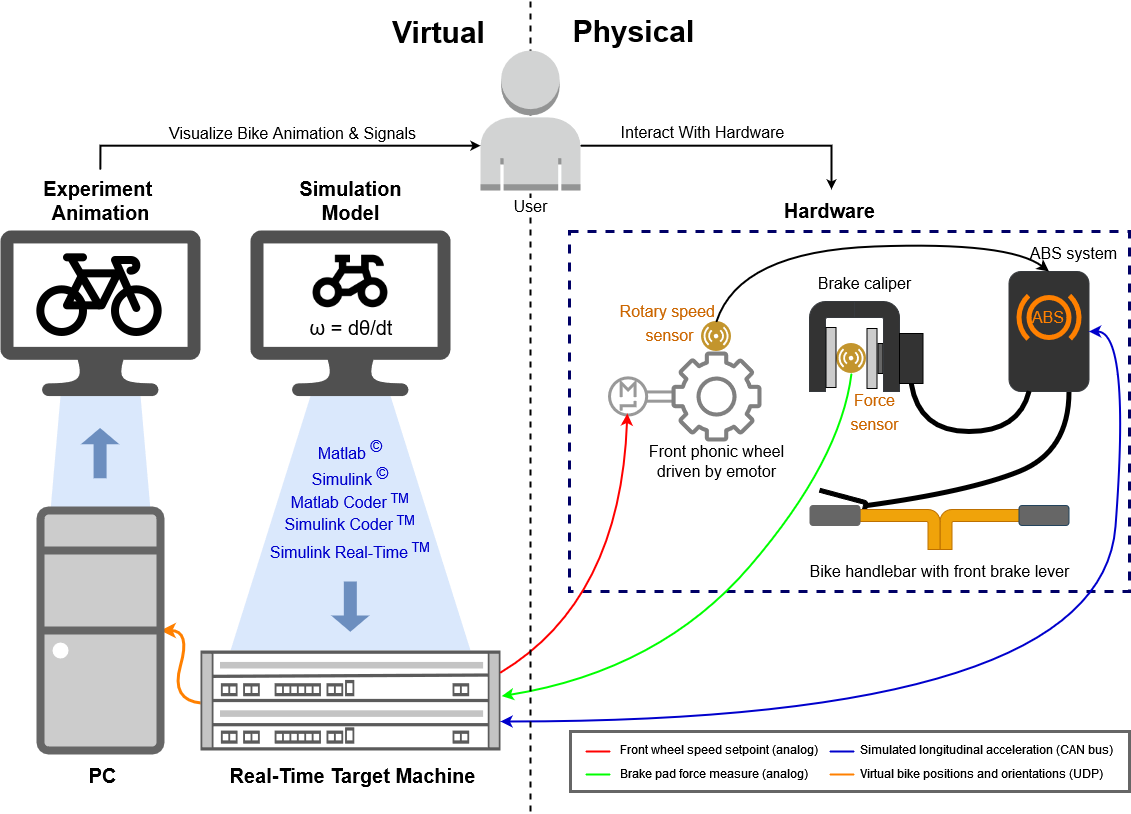
Pour relever ce défi, Emmanuel Viennet professeur associé à la Haute école d'ingénierie de Fribourg (HES-SO Fribourg) a décidé de construire un banc d'essai Hardware-in-the-Loop (HIL) qui permet une validation sûre, fiable et reproductible de l'ABS sur les vélos électriques dans un laboratoire. Son équipe a modélisé le comportement d’un vélo électrique dans le logiciel Simulink® en écrivant les équations de la dynamique du véhicule dans le plan. Les paramètres de transmission de la force des leviers aux étriers de frein, le coefficient de frottement entre les disques et les plaquettes de frein ainsi que le comportement de la suspension ont été identifiés à partir de mesures effectuées sur un vrai vélo avec un ABS désactivé. L'équipe a constaté que la vitesse, la décélération et l'accélération longitudinale de la roue avant simulées corrélaient bien avec résultats obtenus sur le vélo réel. À partir de ce modèle Simulink validé, le code nécessaire à l’exécution du modèle a ensuite été généré et téléchargé sur une machine en temps réel Speedgoat®, elle-même interfacée avec le matériel ABS.
Le banc d'essai physique comprend un guidon avec un levier de frein avant hydraulique actionné par un cylindre pneumatique. Un capteur détecte la force au niveau de l'étrier de frein, servant d'unique entrée au vélo électrique virtuel. Une roue phonique, alimentée par un moteur électrique et un signal du modèle en temps réel, simule la rotation de la roue avant pour générer le signal du capteur de vitesse pour l'ABS. En outre, le modèle temps réel simule l'unité de mesure inertielle intégrée en calculant l'accélération du vélo électrique et en la transmettant au matériel ABS via un message CAN à l'aide de la bibliothèque de pilotes d'E/S Speedgoat.
Le modèle de vélo est entièrement paramétrable, ce qui permet de l'adapter à n'importe quel type de vélo électrique ou de chargement. Il peut être utilisé avec les systèmes ABS existants de différents fournisseurs et permet l'automatisation des tests. Les constructeurs de vélos électriques et les fabricants d'ABS peuvent l'utiliser pour valider rapidement les performances de manière quantitative, sûre et reproductible pour de nombreux cas de test. L'expertise acquise par l'équipe de la HES-SO est destinée à être utilisée dans de futurs projets de développement dans les secteurs de l'automobile et des machines de production.